반응형
#pragma once
#include "ISP.h"
int main()
{
//const int data_w = 5;
//const int data_h = 5;
//uchar Datas[data_w * data_h] = {
//255,255,255,255,255,
//255,255,255,255,255,
//255,255,255,255,255,
//255,255,255,255,255,
//255,255,255,255,255
//};
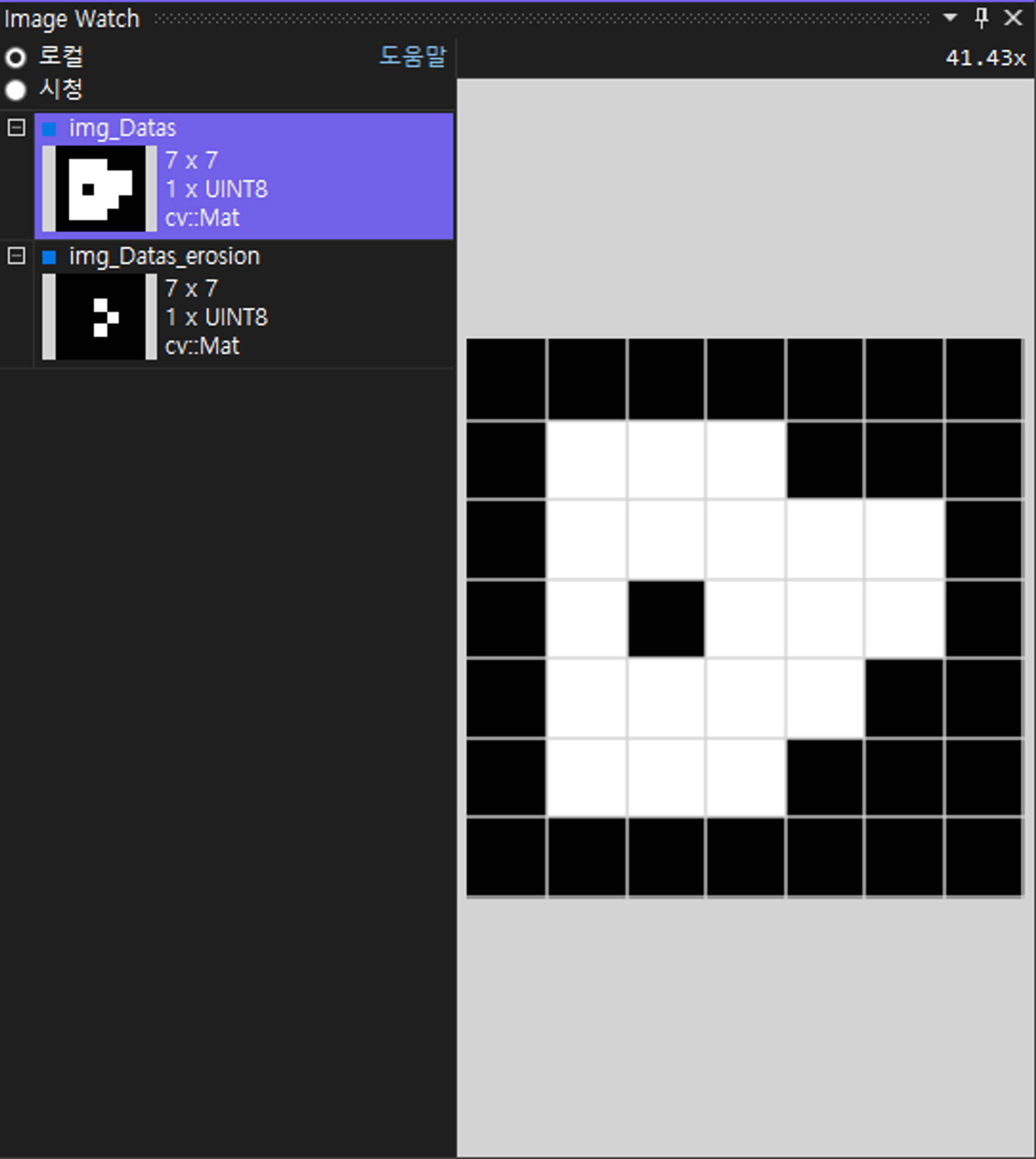
const int data_w = 7;
const int data_h = 7;
uchar Datas[data_w * data_h] = {
000,000,000,000,000,000,000,
000,255,255,255,000,000,000,
000,255,255,255,255,255,000,
000,255,000,255,255,255,000,
000,255,255,255,255,000,000,
000,255,255,255,000,000,000,
000,000,000,000,000,000,000
};
//uchar Datas[data_w * data_h] = {
// 1,1,0,1,1,
// 1,1,0,1,1,
// 0,0,0,0,0,
// 1,1,0,1,1,
// 1,1,0,1,1
//};
//uchar Datas[data_w * data_h] = {
//0,0,1,0,0,
//0,0,1,0,0,
//1,1,1,1,1,
//0,0,1,0,0,
//0,0,1,0,0
//};
Mat img_Datas = Mat(data_h, data_w, CV_8UC1, Datas);
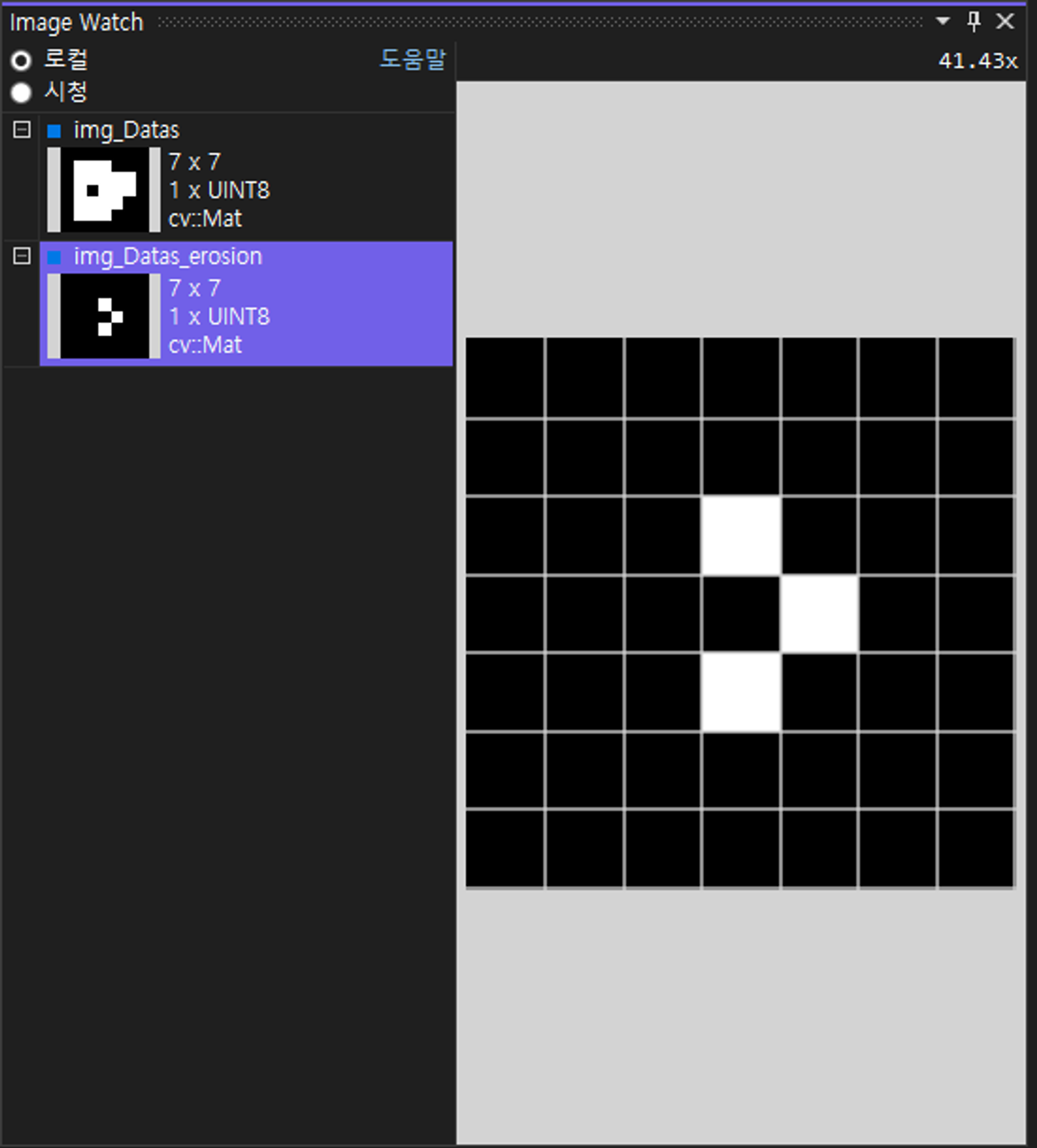
Mat img_Datas_erosion = Mat::zeros(data_h, data_w, CV_8UC1);
//침식(erosion)
const int SE_sz = 3; int SE_half_sz = SE_sz / 2;
int SE_Cross[SE_sz * SE_sz] = {
0,255,0,
255,255,255,
0,255,0 };
int SE_Rect[SE_sz * SE_sz] = {
255,255,255,
255,255,255,
255,255,255 };
//full image searching
uchar* pDst = img_Datas_erosion.data;
for (size_t row = SE_half_sz; row < data_h - SE_half_sz; row++) {
for (size_t col = SE_half_sz; col < data_w - SE_half_sz; col++) {
//struct element
bool allone = true;
for (int h = -SE_half_sz; h <= SE_half_sz; h++) {
for (int w = -SE_half_sz; w <= SE_half_sz; w++) {
int index = (row + h) * data_w + (col + w);
int index_SE = (h + SE_half_sz) * SE_sz + (w + SE_half_sz);
uchar input = Datas[index];
//input == 0 : background
bool condition = (input == 0 && SE_Cross[index_SE] == 255);
if (condition == true)
{
allone = false;
break;
}
}
if (!allone) break;
}
if (allone)
pDst[row * data_w + col] = 255;
else
pDst[row * data_w + col] = 0;
}
}
return 1;
}
위 코드는 사진을 직접 만든 거고 사진을 받아오는 걸로 만들어주면
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../KCCImageNet/images/circle_plate.png";
cv::Mat src_gray = cv::imread(fileName, cv::ImreadModes::IMREAD_GRAYSCALE);
cv::Mat src_bin;
cv::threshold(src_gray, src_bin, 150, 255, ThresholdTypes::THRESH_BINARY);
uchar* pData = src_bin.data;
size_t width = src_gray.cols;
size_t height = src_gray.rows;
Mat src_erosion = Mat::zeros(height, width, CV_8UC1);
//침식(erosion)
const int SE_sz = 5; int SE_half_sz = SE_sz / 2;
int SE_Cross[SE_sz * SE_sz] = {
0,0,255,0,0,
0,255,255,255,0,
255,255,255,255,255,
0,255,255,255,0,
0,0,255,0,0,
};
int SE_Rect[SE_sz * SE_sz] = {
255,255,255,
255,255,255,
255,255,255 };
//full image searching
uchar* pDst = src_erosion.data;
for (size_t row = SE_half_sz; row < height - SE_half_sz; row++) {
for (size_t col = SE_half_sz; col < width - SE_half_sz; col++) {
//struct element
bool allone = true;
for (int h = -SE_half_sz; h <= SE_half_sz; h++) {
for (int w = -SE_half_sz; w <= SE_half_sz; w++) {
int index = (row + h) * width + (col + w);
int index_SE = (h + SE_half_sz) * SE_sz + (w + SE_half_sz);
uchar input = pData[index];
//input == 0 : background
bool condition = (input == 0 && SE_Cross[index_SE] == 255);
if (condition == true)
{
allone = false;
break;
}
}
if (!allone) break;
}
if (allone)
pDst[row * width + col] = 255;
else
pDst[row * width + col] = 0;
}
}
return 1;
}

반응형
'Open CV' 카테고리의 다른 글
| [OPENCV-C++ ] open cv 라이브러리 활용 erode, dilate (0) | 2023.11.26 |
|---|---|
| [OPENCV-C++ ] 형태학 기반 영상처리 Dilation 팽창 (0) | 2023.11.26 |
| [OPENCV-C++ ] BGR→HSV→fndcontours→text로 사진에 데이터 표현 (1) | 2023.11.26 |
| [OPENCV-C++ ] findcontours(외곽 테두리 따주는 친구-segmentation 이어서) (0) | 2023.11.26 |
| [OPENCV-C++ ] segmentation (0) | 2023.11.26 |



